Universal Development Board Reference Manual
Note
The Universal Development Board has been retired and is no longer for sale in our store.
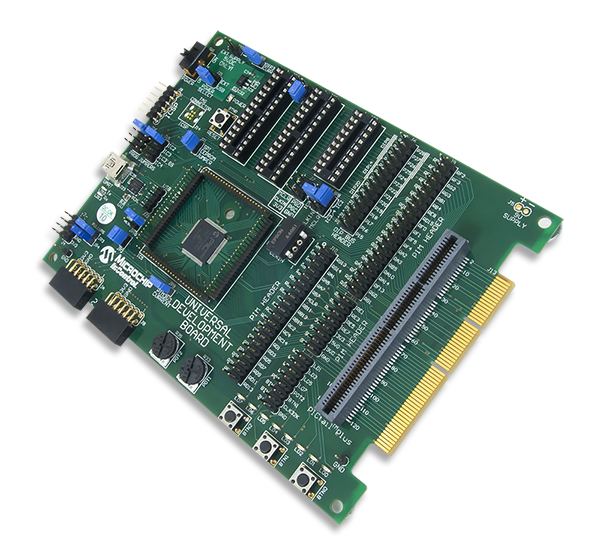
The Universal Development Board (UDB) is a microcontroller development board intended to use with a wide variety of PIC microcontrollers from Microchip®. It was designed to support most 3.3V, PIC microcontrollers in 8-bit, 16-bit, or 32-bit varieties. It will accommodate a wide range of Microchip PIM processor modules as well as DIP packaged parts with pin counts from 8-pin to 28-pin. Three DIP sockets are provided: 20/14/8 PIN 8-bit PIC, 28 PIN 8-bit PIC, and 28-pin PIC24/dsPIC33/PIC32MX. This board also has discrete I/O elements and 2 Pmod ports for further device evaluation or product development capability. Expansion connectors are provided that are compatible with the Microchip PICtail™ Plus line of expansion modules. In addition to the PIM connector and DIP sockets, a PIC32MX360 microcontroller is also provided for use without the need for additional PIM or DIP socketed processors. The Universal Development Board is designed to be compatible with the Microchip Explorer 16 development board. The layout of the PIM connector and PICtail™ Plus bus connections are physically and electrically compatible with the Explorer 16, and many Microchip demonstration programs for the Explorer 16 will work with the UDB.
The Universal Development Board is designed to be compatible with the Microchip Explorer 16 development board. The layout of the PIM connector and PICtail™ Plus bus connections are physically and electrically compatible with the Explorer 16, and many Microchip demonstration programs for the Explorer 16 will work with the UDB.


Features

- Microchip® PIC32MX360 microcontroller
- PICTail™ Bus/PIM connector
- ICSP Header
- 20/14/8 Pin 8-Bit PIC
- 28 Pin 8-Bit PIC
- 28 Pin PIC24/dsPIC33/PIC32MX
- Two Pmod ports
- Three Push Buttons
- Two Analog POTs
- Eight user LEDs
- USB Serial Convertor
- Power from header or USB Convertor
- 3.3V operating voltage
- 8 MHz Oscillator
- Serial EEPROM

| Call Out | Function | Call Out | Function |
|---|---|---|---|
| 1 | J21 Power Select Jumper | 16 | Potentiometer |
| 2 | Power Switch | 17 | PIC32 Microcontroller MX360 |
| 3 | Reset Button | 18 | PIM Header |
| 4 | In Circuit Serial Program Connector | 19 | User I/O Buttons |
| 5 | SPI EPROM Enable | 20 | User I/O LEDs |
| 6 | Programming Jumpers | 21 | GND Reference |
| 7 | PIC32 Current | 22 | PICtail Plus Connector |
| 8 | USB Serial Converter | 23 | PIM header |
| 9 | USB UART Reset | 24 | DIP header |
| 10 | PIC32 Enable | 25 | Programming Jumpers |
| 11 | I2C Connector | 26 | 10/14/8 8 Bit PIC |
| 12 | GND Reference | 27 | 28 Pin Pic 24/ dsPIC33/ PIC32 |
| 13 | PIM Socket | 28 | 28 Pin 8 BIT PIC |
| 14 | Pmod port | 29 | DIP current measurement |
| 15 | PIM current measurement jumper |
1. Power Supply
The UDB can be powered in one of two ways, either by a bench supply or a wall wart type power supply attached to the power header, J20; or from the USB connector, J23, associated with the USB serial converter. The UDB is intended to be operated from a regulated 5V power source, however with certain restrictions, a different supply voltage can be used. The absolute maximum voltage that should be applied to the power header is 6V.
If an external power source other than a regulated 5V supply is used, the voltage on the VCC5V0 bus will be the voltage of the external supply, and the test points on the board labeled 5V will actually be at the voltage of the external supply.
1.1. USB Power
To power the board with from the USB use a USB 2.0 A to Mini B cable to connect the PC to the UDB via connector J23. The Jumper at J21 (power select) must be placed in the USB position and the power switch, SW1, must be in the ON position. When the board is powered, the LED at LD8 will be illuminated.
1.2. External Power Supply
To power the board using an external power supply connected to J20 (EXT Supply 5VDC), the jumper at J21 (Power Select) must be placed on the EXT position. In order for the board to be powered the switch at SW1 must be in the ON position, when the board is powered, the LED at LD8 will illuminate. If SW1 is in the OFF position the UDB is not powered. A fail to power can also occur if the jumper at J21 is in the USB position.
Connector J20 is a two pin header using 100mil spaced, 0.25mil square posts. An MTE style connector or clip leads can be used to supply power to this header. The proper polarity is marked on the board. A Shotkey diode, D5, is provided for reverse polarity protection.
1.3. Power Supply Circuit Description
All on-board circuits operate at 3.3V. The primary regulated power bus VCC3V3 is powered by a voltage regulator circuit made up of IC9, a Microchip MCP1703 LDO voltage regulator and the associated input and output capacitors C32, C33 and C34. This regulator is rated for a maximum dropout of 625mV. To ensure that the regulator output is the proper 3.3V, the minimum voltage applied to the input of the regulator should be 4V. Allowing for the forward drop across the reverse polarity protection diode, D5, in the input circuit, the minimum external supply voltage should be 4.4V.
In addition to the main voltage regulator, a second regulator is used to provide power to the USB serial converter circuit. This regulator is made up of IC11, a Microchip TC1014 LDO voltage regulator and the associated input and output capacitors C28 and C29 and bypass capacitor C30. This regulator is always powered from the USB connector J23, and therefore, power is only supplied to the USB serial converter when J23 is connected to a live USB port.
1.4. 9V0 Power Supply for PIM/PICtail Plus Bus
Some Microchip PICtail™ Plus modules require a 9V power supply to power some of their functions. There is no 9V power supply on the UDB board. If a PICtail™ Plus module is being used that requires the 9V power supply, an external, regulated 9V supply can be attached at J5 to provide this voltage. Jumper J5 is an unloaded, two pin header in the upper right corner of the board. Note the polarity marking on the board as it is not internally protected from reverse polarity.
2. USB to UART Serial Converter
The MCP2200 is a USB-to-UART serial converter which enables USB connectivity in applications that have a UART interface. The serial signals USB-RXD, USB-TXD, USB-CTS, and USB-RTS are available at connector J22, to the right of USB connector J23. The signal names are labeled on the board. Jumper wires can be used to connect the serial interface signals to locations on either the DIP bus or the PIM bus to allow access to the serial interface from a microcontroller in the PIM socket, any of the DIP sockets, or the on-board PIC32MX360.
In order to use the MCP2200 USB serial converter, it is necessary for the appropriate drivers to be installed on the host computer. The necessary drivers as well as a configuration utility and other support software can be downloaded from the MCP2200 product page on the Microchip web site.
Jumper JP10, labeled UART USB RESET on the board, can be used to hold the MCP2200 in reset. Placing a shorting block on JP10 will cause the MCP2200 to be held in reset. This can be useful when using a USB port to power the board and the serial interface isn’t being used. Normally, when the USB cable is connected to a PC, the MCP2200 will be enumerated on the USB bus and the host computer will expect the MCP2200 driver to be loaded. Use of this jumper allows the board to be USB powered without the need for the MCP2200 driver to be installed.
The MCP2200 also has 256-bytes of integrated user EEPROM. There are two LEDs connected to the USB-to-UART serial converter, LD12 which turns on during a transmit process and LD13 which turns on during a receive process. Refer to the Microchip data sheet for the MCP2200 for more detailed information about the operation of the USB serial converter circuit.
3. PIM Module
The UDB was designed with the ability to use detachable PIM processor modules. It will work with 16-bit (PIC24 and dsPIC33) PIMs as well as 32-bit (PIC32) PIMs compatible with the Microchip Explorer 16 development board. PIM processor modules are installed onto the pattern of vertical pins at the location labeled PIM Socket on the board. PIMs are visually indexed for proper orientation. The PIM is always installed with the notched corner mark to the upper left. When installing or removing a PIM module, use care to ensure that the pins of the PIM connector socket properly seat into the socket on the PIM and take care to not bend the pins of the PIM socket pattern on the board.
Jumper JP9, labeled PIM Current on the board, can be used to measure the power supply current being consumed by the PIM module. To measure PIM current, remove the shorting block from JP9 and attach an ammeter in series between the two pins of JP9. When using a PIM module and not measuring current consumption of the PIM, ensure that the shorting block is installed on JP9. The PIM will not receive power if the shorting block is not installed.
The jumper at JP2 is used to enable or disable the on-board PIC32MX360 microcontroller. When using a PIM, ensure that the shorting block is removed from JP2. This will cause the on-board PIC32MX360 to be held in reset. If the shorting block is not removed, the signals from the on-board PIC32MX360 will interfere with signals from the processor in the PIM, causing erratic operation, and possibly damaging one or both processors.
The combination of the on-board PIC32MX360 and the ability to use PIM processor allows the UDB to support most 3V, 16-bit and 32-bit PIC and dsPIC® microcontrollers.
When using PIM modules with the UDB board, refer to the Microchip information sheet for the PIM being used for any necessary information about how the microcontroller signals are connected to the PIM Socket pin positions. Many Microchip PIMs are not wired straight through and it is necessary to refer to the Microchip PIM information sheet to understand how they are wired.
3.1. On-board PIC32MX360
The UDB has a PIC32MX360F512L microcontroller soldered onto the board. This microcontroller is wired to the PICtail™ Plus bus in the same manner as would be the case for a PIM plugged into the PIM Socket. This allows the UDB board to be used for PIC32 application development without requiring the use of PIM or DIP socketed microcontrollers.
Jumper JP11, labeled PIC32 Current on the board, can be used to measure the power supply current being consumed by the on-board PIC32 microcontroller. To measure the on-board PIC32 operating current, remove the shorting block from JP11 and insert an ammeter in series between the two pins of JP11. When not measuring power supply current consumption of the on-board PIC32 microcontroller, ensure that the shorting block is installed on JP11. The on-board PIC32 microcontroller will not receive power if the shorting block is not installed on JP11. When not using the on-board PIC32 and using a PIM modules instead, it may still be necessary to have the shorting block installed on JP11. Leaving the on-board PIC32 microcontroller unpowered may load the pins of the PIM down and cause erratic operation of the processor on the PIM module.
Note: The PIC32 Current measurement jumper, JP11, only exists on Revision E and later UDB boards.
The jumper at JP2 is used to enable or disable the on-board PIC32MX360 microcontroller. When using the on-board PIC32 microcontroller, ensure that no PIM is installed on the PIC Socket and insert a shorting block onto JP2. This enables the on-board PIC32 for operation.
WARNING: Most Microchip programming tools, such as the PICkit® 3, are capable of generating the high programming voltages necessary for programming some PIC microcontrollers. This programming voltage can be as high as 13V for some devices. When programming these devices, the programming voltage is applied to the MCLR pin. The MCLR signal from the programming tool will be connected to the MCLR pin of the on-board PIC32 device whenever the shorting block is installed on jumper JP2. If this programming voltage is applied to the board while the shorting block is installed on JP2, the on-board PIC32 device will be destroyed. This situation can occur in unexpected ways. For example, the Microchip MPLAB® or MPLAB® X development environment will automatically cause the programming voltage to be applied when loading a project with a device selected where it is required. Thus, it is possible to destroy the on-board PIC32 device merely by opening a project in the MPLAB® development environment. As a safety precaution, do not leave the shorting block installed on JP2 unless actively using the on-board PIC32 device and only when a project known to be safe has been loaded into the IDE.
4. PICtail Plus Card Edge Expansion Connectors
The UDB has a PICtail Plus interface that provides the board with basic functionality while still being easily extendable to new technologies as they become available. The PICtail Plus interface is compatible with the PICtail Plus line of expansion modules available from Microchip®.
The PICtail Plus interface is on the right side of the board and labeled PICtail Plus on the board. It is made up of card edge socket, J12, and edge connector land pattern, J13. It is physically and electrically compatible with PICtail Plus expansion modules available from Microchip. Most PICtail modules will plug vertically into socket, J12, but some expansion boards are designed to be coplanar with the microcontroller board and will attach to the card edge land pattern at J13.
The PICtail Plus bus is based on a 120-pin connection divided into three sections of 30pins, 30pins and 56pins. The two 30-pin connections have parallel functionality. Each 30 pin section provides connections to all of the serial communications peripherals, as well as I/O port. This functionality provides enough signals to develop many different expansion interfaces.
In addition to the microcontroller signals, the PICtail Plus bus has pins defined for three power supply voltages and ground. The pins labeled as 3V3 are powered from the main 3.3V power supply on the UDB board. The pins labeled as 5V0 are powered directly from the power supply source selected by the power select jumper J21. These pins will only be at 5.0V if the power supply used to power the board is a regulated 5V supply or USB. The pins labeled as 9V0 are powered from a power supply attached to header J5 in the upper right corner of the board. Header J5 is used to bring in an externally regulated 9V power supply to those pins.
4.1. PIM Bus
The PICtail Plus connectors are connected to the PIM Socket what is called the PIM bus. There are hard wired connections between the pins of the PIM Socket (and the on-board PIC32 microcontroller) and the pins of the PICtail Plus connectors. It is not necessary to use jumper wires to make connections between PIMs (or the on-board PIC32 microcontroller) and PICtail Plus modules connected to the PICtail connectors. The connections between the PIM connector and the PICtail connectors are the same as on a Microchip® Explorer 16 board.
Access to the signals on the PIM bus can be accomplished using the pin header connectors labeled PIM Headers on the board. These headers: J9, J10, and J11, provide access to all microcontroller signals going between the PIM Socket and the PICtail connectors. Connectors J9 and J10 are 40-pin headers, and J11 is a 16 pin header. These are standard 100mil spaced pin header connectors compatible with MTE style connectors.
These connectors can be used to monitor the signals between the microcontroller and the peripheral for debugging purposes when using a PIM or the on-board PIC32MX360 microcontroller. They can also be used to establish connections to the PICtail Plus signals when using a microcontroller in one of the DIP sockets. In this case, MTE jumper wires would be used to make the connections between the DIP bus and the PIM bus.
Refer to Appendix A: PICtail Plus/PIM Bus Connections for a table showing the correspondences between pin numbers and signal assignments for the PICtail Bus the PIM Bus and the PIM Headers.
5. DIP Sockets
The UDB has 3 DIP sockets at locations IC2, IC3, and IC4. These sockets are for 20/14/8-pin 8-Bit PIC, 28-pin PIC24/dsPIC33/PIC32, and 28-pin 8-Bit PIC devices respectively. The board is labeled to reflect this next to each socket. The labeling for IC3 doesn’t mention PIC32, but the board is fully compatible with PIC32MX devices in DIP packages. Generally, only one of these sockets should be used at a time, as all three DIP sockets are wired in parallel and having multiple devices installed simultaneously will cause conflicts between the I/O pins on the various devices.
The pins from the three DIP sockets are wired in parallel and make up the DIP bus. This bus is wired to the DIP Bus header, and jumper wires can be used to jumper signals from the DIP bus header to other locations on the board, such as the user I/O buttons/LEDs or to off board devices.
Although the IC2 socket is a 20-pin socket, smaller pin count DIP devices may be used. When installing a smaller pin count device, such as an 8-pin DIP device into the 20-pin DIP socket, load the device such that pin 1 on the microcontroller is inserted into pin 1 on the socket, i.e. the devices are loaded at the upper end of the socket. The determination of which PIC devices are compatible with the UDB board, and which socket to use is based on the operating voltage range of the microcontroller and the layout of the power, ground and MCLR pins on the device. The UDB operates the microcontroller at 3.3V and therefore, only devices that operate at 3.3V may be used. Microchip® has several conventions for the placement of the power, ground and MCLR pins on their microcontrollers. The following describes the way that the sockets are configured:
The socket at IC2 is designed to accommodate PIC12/PIC16 devices of up to 20 pins. On this socket, VDD is on pin 1, VSS is on pin 20, and MCLR is on pin 4. Any PIC device that matches this pin assignment will be usable. Note that for smaller pin count devices, VSS will be on the highest numbered pin, e.g. pin 8 on an 8-pin device. The following are some of the devices usable in this socket: PIC12F609, PIC12F615, PIC12F617, PIC12F1822, PIC12F1823, PIC16F631, PIC16F677, PIC16F685, PIC16F687, PIC16F689, PIC16F690.
The socket at IC4 is designed to accommodate 28-pin PIC16/PIC18 devices. This socket is wired with MCLR on pin 1, VSS on pins 8 and 19, and VDD on pin 20. The following are some of the devices usable in this socket: PIC16F882, PIC16F883, PIC16F886, PIC16F1933, PIC16F1936, PIC16F1938, PIC18F24J10, PIC18F25J10, PIC18F23K20, PIC18F24K20, PIC18F25K20, PIC18F26K20.
The PIC24J10 and PIC25J10 microcontroller families have an internal voltage regulator for the core operating voltage that requires an external bypass capacitor. For these devices, a 10uF capacitor must be connected to pin-6 on the microcontroller. The UDB board provides this capacitor and jumper JP6 is used to place it in or out of circuit. When using a microcontroller in this family (or possibly others that have this same requirement), install a shorting block onto JP6. These microcontrollers will operate erratically or not at all if this jumper is not installed. When using other microcontroller families, the shorting block on JP6 should be removed. If this shorting block is not removed, the 10uF capacitor will load down the I/O pin significantly slowing down its operation, and possibly stressing the output driver due to excessive current flow when the pin is switching.
The socket at IC3 is designed to accommodate PIC24, dsPIC33 and PIC32 devices in 28-pin DIP packages. The following are examples of PIC devices usable in this socket: PIC24FJxxxGA002 family, PIC24FJxxxGA102 family, PIC24FJxxxGB004 family, dsPIC33FJxxxMC202 family, dsPIC33FJxxxMC302 family, dsPIC33FJxxxMC802 family, dsPIC33FJxxxGP202 family, dsPIC33FJxxxGP302 family, dsPICFJxxxGP802 family, dsPIC33FJ06GS102, dsPICFJ06GS202, dsPICFJ16GS402, dsPICFJ16GS502, any PIC32MX1xx or PIC32MX2xx device.
5.1. DIP Bus Program Signal Jumpers
Various jumpers must be set appropriately to configure the device programming signals depending on which DIP socket is being used. Refer to section 6.3 below for information describing the jumper settings required.
5.2. DIP Bus Clock Jumper
The various PIC microcontrollers that can be used in the DIP sockets all have multiple options for the clock source for the main processor clock. In many cases, an internal oscillator can be used and it is not necessary to set any jumpers when using the internal oscillator. The UDB board provides an external oscillator that can be selected as a clock source when an external oscillator is desired. No explicit provision is made for use of an external crystal or resonator to make use of that clock option.
The UDB board provides an 8-pin DIP socket for an external oscillator. Refer to section 9 below for more information about this oscillator.
Jumper JP7 is used to select the external clock source for the DIP socket being used. JP7 is located near the 20/14/8-pin DIP socket IC2 and the DIP bus header. Place the shorting block in the IC2 position to use the external clock source with DIP socket IC2, or in the IC3/IC4 position to use the external clock source with either of those sockets. Remove the shorting block from JP7 when using the internal oscillator option with the DIP device.
5.3. DIP Bus Header
The three DIP sockets are connected in parallel and wired to the DIP bus header connector, J6. Connector J6 is used to access the I/O signals for the microcontroller being used in one of the DIP sockets. Jumper wires can be used to connect DIP microcontroller signals from the DIP bus connector either to on-board I/O via connector J3; to PIM bus locations via connectors J9, J10, or J11, allowing access to the PICtail™ connectors and thus PICtail™ Plus modules; or to off-board devices.
The assignment of DIP socket pins to header pins on the DIP bus connector follows the convention for pin numbering on DIP sockets, i.e. pin 1 is on the upper left corner to the header and the pin numbering proceeds counter-clockwise around the pins of the header. Connector J6 is a 28-pin (2×14) header connector. It is wired straight through for the 28-pin DIP sockets. When using the 20/14/8-pin DIP socket, or smaller DIP packages (e.g. 8-pin, 14-pin, etc.) in any of the sockets, take care to identify the correct pins to find the microcontroller signals on the DIP bus connector.
To aid in identifying which pins will be active when using smaller pin count DIP devices, vertical bars are marked on silk screen of the board to identify the pins in use for each package size. Refer to the following tables for the correspondence between DIP package pins and connector pins on the DIP bus connector.
5.1.1. 8-pin DIP Package
| DIP Pin | DIP Bus Connector | DIP Pin | DIP Bus Connector |
|---|---|---|---|
| 1 | DPB-P1 | 5 | DPB-P28 |
| 2 | DPB-P2 | 6 | DPB-P27 |
| 3 | DPB-P3 | 7 | DPB-P26 |
| 4 | DPB-P4 | 8 | DPB-P25 |
5.1.2. 14-pin DIP Package
| DIP Pin | DIP Bus Connector | DIP Pin | DIP Bus Connector |
|---|---|---|---|
| 1 | DPB-P1 | 14 | DPB-P28 |
| 2 | DPB-P2 | 13 | DPB-P27 |
| 3 | DPB-P3 | 12 | DPB-P26 |
| 4 | DPB-P4 | 11 | DPB-P25 |
| 5 | DPB-P5 | 10 | DPB-P24 |
| 6 | DPB-P6 | 9 | DPB-P23 |
| 7 | DPB-P7 | 8 | DPB-P22 |
5.1.3. 16-pin DIP Package
| DIP Pin | DIP Bus Connector | DIP Pin | DIP Pin Connector |
|---|---|---|---|
| 1 | DPB-P1 | 16 | DPB-P28 |
| 2 | DPB-P2 | 15 | DPB-P27 |
| 3 | DPB-P3 | 14 | DPB-P26 |
| 4 | DPB-P4 | 13 | DPB-P25 |
| 5 | DPB-P5 | 12 | DPB-P24 |
| 6 | DPB-P6 | 11 | DPB-P23 |
| 7 | DPB-P7 | 10 | DPB-P22 |
| 8 | DPB-P8 | 9 | DPB-P21 |
5.1.4. 20-pin DIP Package
| DIP Pin | DIP Bus Connector | DIP Pin | DIP Bus Connector |
|---|---|---|---|
| 1 | DPB-P1 | 20 | DPB-P28 |
| 2 | DPB-P2 | 19 | DPB-P27 |
| 3 | DPB-P3 | 18 | DPB-P26 |
| 4 | DPB-P4 | 17 | DPB-P25 |
| 5 | DPB-P5 | 16 | DPB-P24 |
| 6 | DPB-P6 | 15 | DPB-P23 |
| 7 | DPB-P7 | 14 | DPB-P22 |
| 8 | DPB-P8 | 13 | DPB-P21 |
| 9 | DPB-P9 | 12 | DPB-P20 |
| 10 | DPB-P10 | 11 | DPB-P19 |
6. In-circuit Serial Programming (ICSP™)
A separate Microchip development tool capable of programming the microcontroller being used is required to make use of the UDB. Suitable tools include the PICkit® 2, PICkit® 3, ICD3 and various other programming tools available from Microchip and some third parties.
The UDB board provides two connectors for attachment of the programming tool to the board. These are the ICSP connector, J8, and the Tag connector, J14.
6.1. ICSP Connector
The ICSP connector, J8, is a 6-pin, right angle, make header suitable for direct connection of a PICkit® 2 or PICkit® 3 programming tool. Microchip have adapters available for connection of other development tools, such as the ICD3 or the RealICE to this connector (part# AC164110).
6.2. Tag Connector
The Tag connector, J14, is a relatively new programming tool connection standard developed by Microchip®. It is made up of a land and hole pattern on the board. A special header snaps onto the board at this location to make the necessary signal connections. Refer to the Microchip® web site and Microchip® documentation to find the appropriate Tag connector adapter to use with the programming tool being used.
6.3. Programming Signals
The programming signals used by the ICSP interface are: reset (MCLR), program clock (PGC), and program data (PGD). These signals are permanently wired to the PIM socket and to the on-board PIC32 microcontroller. When using either of these devices, no jumper setting is required, except that a shorting block must be installed on the PIC32 Enable jumper, JP2, when using the on-board PIC32MX360 microcontroller, or removed when using a PIM.
When using any of the DIP sockets, it is necessary to jumper the board to select the socket being used. Programming jumpers J15 and J16 (labeled PROG JUMPERS on the board) are used to route the programming signals PGC and PGD to the appropriate DIP socket. These jumpers are on the left side of the board near the ICSP connector.
Place shorting blocks in the appropriate position of J15 and J16 for the DIP socket being used. When using a DIP device in the IC2 socket, place the shorting blocks in the IC2 position. Similarly when using the IC4 socket, place the shorting blocks in the IC4 position. Note that there are two positions for socket IC3. This is because there are two different programming signal pin assignment conventions used for PIC24 devices. For PIC24 GS family devices, place the shorting blocks in the IC3_GS position. For all other PIC24 devices, as well as dsPIC33 and PIC32 devices, place the shorting blocks in the IC3 position. It is necessary for shorting blocks to be placed in the same position on both J15 and J16.
Programming jumper JP8 is used to route the MCLR signal to the appropriate pin depending on the socket being used. Jumper JP8 is in the vicinity of the DIP bus header and the 20/14/8-pin socket IC2. This is a two position jumper. Place the shorting block in the IC2 position when using the IC2 socket, and place the shorting block in the IC3/4 position when using either of those sockets.
When using either a PIM on the PIM Socket, or a DIP device in any of the DIP sockets, the on-board PIC32MX360 should be disabled by removing the shorting block from the PIC32 Enable jumper, JP2.
The programming signals MCLR, PGD and PGC are available on pins 1, 2, and 4, respectively of header J7 (labeled PROG on the board). The pins on J7 can be used to monitor the programming signals for troubleshooting purposes, or using jumper wires, it is possible to route the signals to other places on the board.
6.3.1. IC2 Program Jumper Settings
The following diagram illustrates the setting for the program jumpers when using PIC12/16 devices in DIP socket IC2.

6.3.2. IC3 Program Jumper Settings
The following diagram illustrates the settings for the program jumpers when using dsPIC33, PIC32, and most PIC24 devices in DIP socket IC3.

6.3.3. IC3_GS Program Jumper Settings
The following diagram illustrates the settings for the program jumpers when using PIC24 GS family devices in DIP socket IC3.

6.3.4. IC4 Program Jumper Settings
The following diagram illustrates the settings for the program jumpers when using PIC16/PIC18 devices in DIP socket IC4.

7. Oscillator Options
The UDB board has provision for two oscillators: an 8-pin DIP socket, IC6, for a socketed high frequency oscillator, and an unload footprint, IC1, for a surface mounted 32.768KKHz low frequency oscillator.
7.1. High Frequency Oscillator
Oscillator socket IC6, labeled CLKIN on the board, is used to provide a high frequency clock source for the processor clock for use with any of the DIP sockets, the PIM socket, or the on-board PIC32MX360. As shipped from the factory, IC6 is loaded with an Epson SG8002 programmable CMOS oscillator. The oscillator shipped with the board will be programmed to operate at 8MMHz. The SG8002 is a one-time programmable device that can be programmed for any frequency in the range 1MHz to 120MHz. If an oscillator frequency other than 8MHz is desired, an SG8002 programmed to the desired frequency can be obtained and installed in the IC6 socket. An SG8002 programmed to the desired operating frequency can be obtained from a number of electronics distributors, such as Digikey® or Mouser. The SG8002 is available in both 5V and 3.3V versions. Ensure that a 3.3V device is obtained when purchasing a new oscillator.
The output of the IC6 oscillator, called CLKIN in the schematic, is hard wired to the OSC1/CLKI/RC12 position on the PIM socket and the on-board PIC32 microcontroller. This makes the oscillator output available as an external clock source for either the microcontroller on a PIM or the on-board PIC32MX360. The CLKIN signal can be routed to the appropriate DIP socket by installing a shorting block in the appropriate position on clock select jumper JP7.
The CLKIN signal is also available on pin 3 of header J7. Pin3 of J7 can be used to monitor the clock signal for troubleshooting purposes, or using a jumper wire, the clock signal can be routed to other positions on the board.
7.2. Low Frequency Oscillator
An unloaded footprint is provided for a 32.768KHzlow frequency oscillator. If desired, an oscillator such as an Abracon ASVK-32.768ZEC can be loaded at IC1. This is a 3.3V CMOS crystal oscillator in a 7.0x5.0mm package. It will provide a low frequency time source that can be used either as a low frequency processor clock, or as a time source for a real time clock calendar (RTCC) peripheral in one of the microcontrollers. The IC1 footprint is on the bottom of the board in the lower left corner underneath the area where the user LEDs are located.
The output of the low frequency oscillator, labeled CLK32K, appears on pin 14 of header connector J3 along with the user I/O devices on the board. A jumper wire can be used to route this any suitable location on the board.
To use the low frequency oscillator as a clock input source: Remove the oscillator from IC6; use a jumper wire to connect J3, pin 14 (CLK32K) to J7, pin 3 (CLKIN); select the appropriate socket using JP7. This applies the 32KHz oscillator output to the external clock input pin on the PIC microcontroller in the selected DIP socket.
8. I2C Interface
The Inter-Integrated Circuit (I2CTM) Interface provides a medium speed (100K or 400K bps) synchronous serial communications bus. The I2C interface provides master and slave operation using either 7 bit or 10 bit device addressing. Each device is given a unique address, and the protocol provides the ability to address packets to a specific device or to broadcast packets to all devices on the bus. Refer to the Microchip for the particular microcontroller used for detailed information on configuring and using the I2C interface.
The UDB provides one I2C daisy-chain connector, J4. This connector is a standard 2×4 pin header connector with 0.100” spaced pins. It provides access to the I2C signals, SCL, and SDA, plus VCC3V3 and ground. The VCC3V3 can be used to power external I2C devices. This connector provides two positions for connecting to the I2C bus. By using two-wire or four-wire MTE cables (available separately from Digilent) a daisy chain of multiple I2C-capable devices can be created.
The I2C bus uses open collector drivers to allow multiple devices to drive the bus signals. Devices on the bus actively drive the signals low. The high state on the I2C signals is achieved by pull-up resistors when no device is driving the lines low. One device on the I2C bus must provide the pull-up resistors.
The UDB provides 2.2K-ohm pull-up resistors. Generally, only one set of pull-up resistors is used on the bus. Jumpers JP3 and JP4 can be used to disable the on-board pull-up resistors if a different value is needed or some other device on the bus is providing the pull-ups. The on-board pull-up resistors are enabled by install shorting blocks on JP3 and JP3. Removing the shorting blocks disables the pull-up resistors.

9. Pmod Interface
The UDB board provides two Pmod ports for use with Pmods. Pmods are a line of small peripheral interface modules available from Digilent. The range of available Pmod peripheral modules include various ports; sensors such as accelerometers and gyroscopes; a wide variety of A/D and D/A converters; input/output devices such as buttons, switches, LEDs, LCD display, and OLED graphics displays; h-bridge and open drain FET modules for controlling motors and solenoids; and communications modules such as WiFi and BlueTooth interface modules.
The Pmod modules can plug directly into the Pmod port, or can be connected via six-pin or twelve-pin cables. Two six pin peripheral modules can be connected to a single 12-pin port via a twelve-pin to dual six-pin splitter cable. Pmods are powered by the UDB via the interface’s power and ground pins.
There are two 12-pin Pmod ports on the UDB, labeled JA and JB. Each Pmod port provides eight I/O signal pins, two power pins, and two ground pins. The signals are arranged so that the connector provides either a single 12-pin interface or two stacked 6-pin interfaces on each Pmod connector.
The pin numbering that Digilent uses on the 12-pin Pmod ports is non-standard. The upper row of pins are numbered 1–6, right to left (when viewed from the end of the port), and the lower row of pins are numbered 7–12, right to left. This is in keeping with the convention that the upper and lower rows of pins can be considered to be two six-pin ports stacked. When viewed from the end of the port, pin 1 is the upper right pin and pin 7 is immediately below it (closer to the PCB).

The Pmod ports are wired to locations on the PIM bus. They can be accessed directly from either the microcontroller on a PIM module or the on-board PIC32MX360. To use the Pmod ports from a microcontroller in one of the DIP sockets, it is necessary to use jumper wires to make the signal connections from the DIP bus header to the PIM bus headers.
The following tables give the signal locations on the PIM bus headers to which the Pmod port pins are wired.
9.1. Pmod Connector JA
| Pmod Pin | PIM Bus Pin | Signal |
|---|---|---|
| JA-1 | J9-21, RG9 | RG9/PMPA2/SS2 |
| JA-2 | J9-27, RG8 | RG8/PMPA3/SDO2 |
| JA-3 | J9-23, RG7 | RG7/PMPA4/SDI2 |
| JA-4 | J9-24, RG6 | RG6/PMPA5/SCK2 |
| JA-5 | GND | |
| JA-6 | VCC3V3 | |
| JA-7 | J10-20, RB15 | RB15/PMPA0 |
| JA-8 | J10-32, RD5 | RD5/PMPRD |
| JA-9 | J10-29, RD4 | RD4/PMPWR |
| JA-10 | J10-15, RB14 | RB14/PMPA1 |
| JA-11 | GND | |
| JA-12 | VCC3V3 |
9.2. Pmod Connector JB
| Pmod Pin | PIM Bus Pin | Signal |
|---|---|---|
| JB-1 | J10-39, RE0 | RE0/PMPD0 |
| JB-2 | J11-2, RE1 | RE1/PMPD1 |
| JB-3 | J11-1, RE2 | RE2/PMPD2 |
| JB-4 | J11-4, RE3 | RE3/PMPD3 |
| JB-5 | GND | |
| JB-6 | VCC3V3 | |
| JB-7 | J11-3, RE4 | RE4/PMPD4 |
| JB-8 | J11-6, RE5 | RE5/PMPD5 |
| JB-9 | J11-5, RE6 | RE6/PMPD6 |
| JB-10 | J11-8, RE7 | RE7/PMPD7 |
| JB-11 | GND | |
| JB-12 | VCC3V3 |
10. Serial EEPROM
A 25LC256 256K (32K x 8) serial EEPROM, IC7, is included for nonvolatile firmware storage. It is also used to demonstrate the SPI bus operation. Note, this EEPROM is only present on Rev E and later boards.
This EEPROM is connected to the SPI 2 position on the PIM bus. It is connected to the signals: RG6/PMPA5/SCK2, RG7/PMPA4/SDI2 and RG8/PMPA3/SDO2. The chip select (CS) of the EEPROM is accessed via signal RD12 on the PIM bus.
Jumper JP1, labeled SPI EEPROM Enable, is used to enable/disable the EEPROM. Remove the shorting block on JP1 to disable the EEPROM. When the shorting block is removed, the EEPROM is held disabled and its other signals will be tristated. When the shorting block is installed on JP1, the CS pin is connected to PIM bus signal RD12 and the EEPROM can be enabled by driving RD12 low.
The SPI EEPROM is wired directly to the PIM bus. To use it from a DIP device in one of the DIP sockets, it is necessary to use jumper wires from the DIP bus header to the PIM bus header to connect the appropriate DIP microcontroller pins to the above noted signals on the PIM bus. When doing this, ensure that there is no PIM installed in the PIM socket and that the on-board PIC32MX360 is disabled by removing the shorting block from the PIC32 Enable jumper.
11. User I/O Devices
The USB features two potentiometers, three push button switches and eight discrete LEDs to provide on-board I/O user I/O devices. These devices are not pre-wired to any microcontroller pin position, and jumper wires are used to attach them to the desired microcontroller pin for the device being used. The connection points for these on-board I/O devices appear on connector J3. Connector J3 also provides access to the VCC3V3 bus and the GND bus for connection to external circuits.
11.1. Analog Input (Potentiometer)
There are two 10kΩ potentiometers located at R33 and R35 on the UDB. These pots are connected to the PIM headers at J3. The Header at J3 marks the pin for POT1 and POT2 on the board. The maximum value of the potentiometers is reached by rotating to the left position. When the POT is rotated to the right, lower values are reached until minimum at the far right position. A 1K ohm resistor is provided in series with the wiper of each potentiometer to protect against hard shorts to VCC3V3 or GND when the wipers are at either end of their rotation.
Refer to Appendix B: User I/O Devices for a table showing the layout of header J3.
11.2. Switches
Three push button switches: BTN0, BTN1, and BTN3 are provided. These buttons are active high. The output pins are pulled to ground through 20K ohm when the button is not pressed, and are pulled to VCC3V3 through 10K ohm when the button is pressed. The BNT0, BNT1, and BTN3 positions are labeled on the board at connector J3.
11.3. LEDs
There are eight user I/O LEDs on the UDB. The LEDs are located at LD0 through LD7 which are connected to the PIM headers of J3. Each LED pin on PIM header J3 is marked on the PCB. The pins are set to low to light each LED and high to turn each LED off.
Appendix A: PICtail Plus/PIM Bus Connections
The following table, sorted by PICtail Plus connector pin, shows the connections between the PICtail connectors, the PIM socket, the on-board PIC32MX360 and the PIM headers.
| PICtail™ Pin | PIM/PIC32 Pin | PIM Header | Signal | Standard Usage |
|---|---|---|---|---|
| 1 | 23 | J9-1, RB2 | RB2/SS1/AN2 | SPI1 SS |
| 2 | 52 | J9-2, RF2 | RF2/U1RX | UART1 RXD |
| 3 | 55 | J9-3, RF6 | RF6/SCK1 | SPI1 SCK |
| 4 | 51 | J9-4, RF3 | RF3/U1TX | UART1 TXD |
| 5 | 54 | J9-5, RF7 | RF7/SDI1 | SPI1 SDI |
| 6 | 57 | J9-6, RG2 | RG2/SCL1 | I2C1 SCL |
| 7 | 53 | J9-7, RF8 | RF8/SDO1 | SPI1 SDO |
| 8 | 56 | J9-8, RG3 | RG3/SDA1 | |
| 9 | GND | |||
| 10 | GND | |||
| 11 | 25 | J9-9, RB0 | RB0 | |
| 12 | 24 | J9-10, RB1 | RB1 | |
| 13 | 22 | J9-11, RB3 | RB3/AN3 | |
| 14 | 21 | J9-12, RB4 | RB4/AN4 | |
| 15 | GND | |||
| 16 | GND | |||
| 17 | 19 | J9-13, RE9 | RE9/INT2 | |
| 18 | 18 | J9-14, RE8 | RE8/INT1 | |
| 19 | 47 | J9-15, RD14 | RD14/U1CTS | |
| 20 | 48 | J9-16, RD15 | RD15/U1RTS | |
| 21 | VCC3V3 | |||
| 22 | VCC3V3 | |||
| 23 | VCC5V0 | |||
| 24 | VCC5V0 | |||
| 25 | VCC9V0 | |||
| 26 | VCC9V0 | |||
| 27 | 90 | J9-17, RG0 | RG0 | |
| 28 | 87 | J9-18, RF0 | RF0 | |
| 29 | 89 | J9-19, RG1 | RG1 | |
| 30 | 88 | J9-20, RF1 | RF1 | |
| 31 | N/C | |||
| 32 | N/C | |||
| 33 | 17 | J9-21, RG9 | RG9/PMPA2/SS2 | SPI2 SS, JA-1 |
| 34 | 49 | J9-24, RF4 | RF4/PMPA9/U2RX | UART2 RXD |
| 35 | 10 | J9-23, RG6 | RG6/PMPA5/SCK2 | SPI2 SCK, JA-4 |
| 36 | 50 | J9-22, RF5 | RF5/PMPA8/U2TX | UART2 TXD |
| 37 | 11 | J9-25, RG7 | RG7/PMPA4/SDI2 | JA-3 |
| 38 | 58 | J9-26, RA2 | RA2/SCL2 | |
| 39 | 12 | J9-27, RG8 | RG8/PMPA3/SDO2 | JA-2 |
| 40 | 59 | J9-28, RA3 | RA3/SDA2 | |
| 41 | GND | |||
| 42 | GND | |||
| 43 | 32 | J9-29, RB8 | RB8/AN8 | |
| 44 | 33 | J9-30, RB9 | RB9/AN9 | |
| 45 | 28 | J9-31, RA9 | RA9/PMPA7 | |
| 46 | 29 | J9-32, RA10 | RA10/PMPA6 | |
| 47 | GND | |||
| 48 | GND | |||
| 49 | 67 | J9-33, RA15 | RA15/INT4 | |
| 50 | 66 | J9-34, RA14 | RA14/INT3 | |
| 51 | 40 | J9-35, RF12 | RF12/U2CTS | |
| 52 | 39 | J9-36, RF13 | RF13/U2RTS | |
| 53 | VCC3V3 | |||
| 54 | VCC3V3 | |||
| 55 | VCC5V0 | |||
| 56 | VCC5V0 | |||
| 57 | VCC9V0 | |||
| 58 | VCC9V0 | |||
| 59 | N/C | |||
| 60 | 90 | J9-38, RG0 | RG0 | |
| 61 | N/C | |||
| 62 | 89 | J9-40, RG1 | RG1 | |
| 63 | N/C | |||
| 64 | N/C | |||
| 65 | 1 | J9-37, RG15 | RG15 | |
| 66 | 97 | J10-2, RG13 | RG13 | |
| 67 | 96 | J9-39, RG12 | RG12 | |
| 68 | 95 | J10-4, RG14 | RG14 | |
| 69 | 17 | J10-1, RA0 | RA0/TMS | |
| 70 | 38 | J10-6, RA1 | RA1/TCK | |
| 71 | 60 | J10-3, RA4 | RA4/TDI | |
| 72 | 61 | J10-8, RA5 | RA5/TDO | |
| 73 | 91 | J10-5, RA6 | RA6 | |
| 74 | 92 | J10-10, RA7 | RA7 | |
| 75 | 26 | J10-7, RB6 | RB6/AN6 | |
| 76 | 27 | J10-12, RB7 | RB7/AN7 | |
| 77 | 20 | J10-9, RB5 | RB5/AN5 | |
| 78 | 13 | J10-14, MCLR | MCLR | |
| 79 | 34 | J10-11, RB10 | RB10/PMPA13 | |
| 80 | 35 | J10-16, RB11 | RB11/PMPA12 | |
| 81 | 41 | J10-13, RB12 | RB12/PMPA11 | |
| 82 | 42 | J10-18, RB13 | RB13/PMPA10 | |
| 83 | 43 | J10-15, RB14 | RB14/PMPA1 | JA-10 |
| 84 | 44 | J10-20, RB15 | RB15/PMPA0 | JA-7 |
| 85 | 6 | J10-17, RC1 | RC1 | |
| 86 | 7 | J10-22, RC2 | RC2 | |
| 87 | 8 | J10-19, RC3 | RC3 | |
| 88 | 9 | J10-24, RC4 | RC4 | |
| 89 | 73 | J10-21, RC13 | RC13 | |
| 90 | 74 | J10-26, RC14 | RC14 | |
| 91 | N/C | |||
| 92 | N/C | |||
| 93 | 72 | J10-25, RD0 | RD0 | |
| 94 | 76 | J10-28, RD1 | RD1 | |
| 95 | 77 | J10-27, RD2 | RD2 | |
| 96 | 78 | J10-30, RD3 | RD3/PMPBE | |
| 97 | 81 | J10-29, RD4 | RD4/PMPWR | JA-9 |
| 98 | 82 | J10-32, RD5 | RD5/PMPRD | JA-8 |
| 99 | 83 | J10-31, RD6 | RD6 | |
| 100 | 84 | J10-34, RD7 | RD7 | |
| 101 | 68 | J10-33, RD8 | RD8 | |
| 102 | 69 | J10-36, RD9 | RD9 | |
| 103 | 70 | J10-35, RD10 | RD10/PMPCS2 | |
| 104 | 71 | J10-38, RD11 | RD11/PMPCS1 | |
| 105 | 79 | J10-37, RD12 | RD12 | |
| 106 | 80 | J10-40, RD13 | RD13 | |
| 107 | VCC3V3 | |||
| 108 | VCC3V3 | |||
| 109 | 93 | J10-39, RE0 | RE0/PMPD0 | JB-1 |
| 110 | 94 | J11-2, RE1 | RE1/PMPD1 | JB-2 |
| 111 | 98 | J11-1, RE2 | RE2/PMPD2 | JB-3 |
| 112 | 99 | J11-4, RE3 | RE3/PMPD3 | JB-4 |
| 113 | 100 | J11-3, RE4 | RE4/PMPD4 | JB-7 |
| 114 | 3 | J11-6, RE5 | RE5/PMPD5 | JB-8 |
| 115 | 4 | J11-5, RE6 | RE6/PMPD6 | JB-9 |
| 116 | 5 | J11-8, RE7 | RE7/PMPD7 | JB-10 |
| 117 | N/C | |||
| 118 | N/C | |||
| 119 | GND | |||
| 120 | GND |
Appendix B: PICtail Plus/PIM Bus Connections
The following table, sorted by PICtail Plus connector pin, shows the connections between the PICtail connectors, the PIM socket, the on-board PIC32MX360 and the PIM headers.
| PICtail Pin | Plus/PIM | PIM Header | Signal | Standard Usage |
|---|---|---|---|---|
| 65 | 1 | J9-37, RG15 | RG15 | |
| 114 | 3 | J11-6, RE5 | RE5/PMPD5 | JB-8 |
| 115 | 4 | J11-5, RE6 | RE6/PMPD6 | JB-9 |
| 116 | 5 | J11-8, RE7 | RE7/PMPD7 | JB-10 |
| 85 | 6 | J10-17, RC1 | RC1 | |
| 86 | 7 | J10-22, RC2 | RC2 | |
| 87 | 8 | J10-19, RC3 | RC3 | |
| 88 | 9 | J10-24, RC4 | RC4 | |
| 35 | 10 | J9-23, RG6 | RG6/PMPA5/SCK2 | SPI2 SCK, JA-4 |
| 37 | 11 | J9-25, RG7 | RG7/PMPA4/SDI2 | JA-3 |
| 39 | 12 | J9-27, RG8 | RG8/PMPA3/SDO2 | JA-2 |
| 78 | 13 | J10-14, MCLR | MCLR | |
| 33 | 14 | J9-21, RG9 | RG9/PMPA2/SS2 | SPI2 SS, JA-1 |
| 69 | 17 | J10-1, RA0 | RA0/TMS | |
| 18 | 18 | J9-14, RE8 | RE8/INT1 | |
| 17 | 19 | J9-13, RE9 | RE9/INT2 | |
| 77 | 20 | J10-9, RB5 | RB5/AN5 | |
| 14 | 21 | J9-12, RB4 | RB4/AN4 | |
| 13 | 22 | J9-11, RB3 | RB3/AN3 | |
| 1 | 23 | J9-1, RB2 | RB2/SS1/AN2 | SPI1 SS |
| 12 | 24 | J9-10, RB1 | RB1 | |
| 11 | 25 | J9-9, RB0 | RB0 | |
| 75 | 26 | J10-7, RB6 | RB6/AN6 | |
| 76 | 27 | J10-12, RB7 | RB7/AN7 | |
| 45 | 28 | J9-31, RA9 | RA9/PMPA7 | |
| 46 | 29 | J9-32, RA10 | RA10/PMPA6 | |
| 43 | 32 | J9-29, RB8 | RB8/AN8 | |
| 44 | 33 | J9-30, RB9 | RB9/AN9 | |
| 79 | 34 | J10-11, RB10 | RB10/PMPA13 | |
| 80 | 35 | J10-16, RB11 | RB11/PMPA12 | |
| 70 | 38 | J10-6, RA1 | RA1/TCK | |
| 52 | 39 | J9-36, RF13 | RF13/U2RTS | |
| 51 | 40 | J9-35, RF12 | RF12/U2CTS | |
| 81 | 41 | J10-13, RB12 | RB12/PMPA11 | |
| 82 | 42 | J10-18, RB13 | RB13/PMPA10 | |
| 83 | 43 | J10-15, RB14 | RB14/PMPA1 | JA-10 |
| 84 | 44 | J10-20, RB15 | RB15/PMPA0 | JA-7 |
| 19 | 47 | J9-15, RD14 | RD14/U1CTS | |
| 20 | 48 | J9-16, RD15 | RD15/U1RTS | |
| 34 | 49 | J9-24, RF4 | RF4/PMPA9/U2RX | UART2 RXD |
| 36 | 50 | J9-22, RF5 | RF5/PMPA8/U2TX | UART2 TXD |
| 4 | 51 | J9-4, RF3 | RF3/U1TX | UART1 TXD |
| 2 | 52 | J9-2, RF2 | RF2/U1RX | UART1 RXD |
| 7 | 53 | J9-7, RF8 | RF8/SDO1 | SPI1 SDO |
| 5 | 54 | J9-5, RF7 | RF7/SDI1 | SPI1 SDI |
| 3 | 55 | J9-3, RF6 | RF6/SCK1 | SPI1 SCK |
| 8 | 56 | J9-8, RG3 | RG3/SDA1 | I2C1 SDA |
| 6 | 57 | J9-6, RG2 | RG2/SCL1 | I2C1 SCL |
| 38 | 58 | J9-26, RA2 | RA2/SCL2 | |
| 40 | 59 | J9-28, RA3 | RA3/SDA2 | |
| 71 | 60 | J10-3, RA4 | RA4/TDI | |
| 72 | 61 | J10-8, RA5 | RA5/TDO | |
| 50 | 66 | J9-34, RA14 | RA14/INT3 | |
| 49 | 67 | J9-33, RA15 | RA15/INT4 | |
| 101 | 68 | J10-33, RD8 | RD8 | |
| 102 | 69 | J10-36, RD9 | RD9 | |
| 103 | 70 | J10-35, RD10 | RD10/PMPCS2 | |
| 104 | 71 | J10-38, RD11 | RD11/PMPCS1 | |
| 93 | 72 | J10-25, RD0 | RD0 | |
| 89 | 73 | J10-21, RC13 | RC13 | |
| 90 | 74 | J10-26, RC14 | RC14 | |
| 94 | 76 | J10-28, RD1 | RD1 | |
| 95 | 77 | J10-27, RD2 | RD2 | |
| 96 | 78 | J10-30, RD3 | RD3/PMPBE | |
| 105 | 79 | J10-37, RD12 | RD12 | |
| 106 | 80 | J10-40, RD13 | RD13 | |
| 97 | 81 | J10-29, RD4 | RD4/PMPWR | JA-9 |
| 98 | 82 | J10-32, RD5 | RD5/PMPRD | JA-8 |
| 99 | 83 | J10-31, RD6 | RD6 | |
| 100 | 84 | J10-34, RD7 | RD7 | |
| 28 | 87 | J9-18, RF0 | RF0 | |
| 30 | 88 | J9-20, RF1 | RF1 | |
| 29 | 89 | J9-19, RG1 | RG1 | |
| 62 | 90 | J9-40, RG1 | RG1 | |
| 27 | 91 | J9-17, RG0 | RG0 | |
| 60 | 92 | J9-38, RG0 | RG0 | |
| 73 | 93 | J10-5, RA6 | RA6 | |
| 74 | 94 | J10-10, RA7 | RA7 | |
| 109 | 95 | J10-39, RE0 | RE0/PMPD0 | JB-1 |
| 110 | 96 | J11-2, RE1 | RE1/PMPD1 | JB-2 |
| 68 | 97 | J10-4, RG14 | RG14 | |
| 67 | 98 | J9-39, RG12 | RG12 | |
| 66 | 99 | J10-2, RG13 | RG13 | |
| 111 | 100 | J11-1, RE2 | RE2/PMPD2 | JB-3 |
| 112 | J11-4, RE3 | RE3/PMPD3 | JB-4 | |
| 113 | J11-3, RE4 | RE4/PMPD4 | JB-7 | |
| 9 | GND | |||
| 10 | GND | |||
| 15 | GND | |||
| 16 | GND | |||
| 21 | VCC3V3 | |||
| 22 | VCC3V3 | |||
| 23 | VCC5V0 | |||
| 24 | VCC5V0 | |||
| 25 | VCC9V0 | |||
| 26 | VCC9V0 | |||
| 31 | N/C | |||
| 32 | N/C | |||
| 41 | GND | |||
| 42 | GND | |||
| 47 | GND | |||
| 48 | GND | |||
| 53 | VCC3V3 | |||
| 54 | VCC3V3 | |||
| 55 | VCC5V0 | |||
| 56 | VCC5V0 | |||
| 57 | VCC9V0 | |||
| 58 | VCC9V0 | |||
| 59 | N/C | |||
| 61 | N/C | |||
| 63 | N/C | |||
| 64 | N/C | |||
| 91 | N/C | |||
| 92 | N/C | |||
| 107 | VCC3V3 | |||
| 108 | VCC3V3 | |||
| 117 | N/C | |||
| 118 | N/C | |||
| 119 | GND | |||
| 120 | GND |
Appendix C: User I/O Devices
| I/O Device | Connector Pin | I/O Device | Connector Pin |
|---|---|---|---|
| LD0 | 1 | 2 | LD1 |
| LD2 | 3 | 4 | LD3 |
| LD4 | 5 | 6 | LD5 |
| LD6 | 7 | 8 | LD7 |
| POT1 | 9 | 10 | POT2 |
| BTN0 | 11 | 12 | BTN1 |
| BTN2 | 13 | 14 | CLK32K |
| VCC3V3 | 15 | 16 | GND |