Pmod NAV Reference Manual
The Pmod NAV is now retired and no longer for sale in our store.
The Digilent Pmod NAV (Revision C) uses the LSM9DS1 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer, plus the LPS25HB digital barometer to provide users with 10-DOF functionality.
Download This Reference Manual
Features
- ±2/±4/±8/±16 g linear acceleration full scale
- ±245/±500/±2000 dps angular rate full scale
- ±4/±8/±12/±16 gauss magnetic full scale
- 260-1260 hPa piezoresistive pressure sensor
- Embedded temperature sensors for compensation
- 12-pin Pmod connector with SPI interface
- Follows Digilent Interface Specification Type 2A
Functional Description
The Pmod NAV provides a variety of orientation related data allowing users to easily determine the exact position the module is in and where it is headed. With 16-bit full scale registers for acceleration, rotation, and orientation, and 24 bits of resolution for pressure data, users can easily figure out if their moving robot is falling over, how high in the air their hot air balloon is located, or which direction they are facing.
Interfacing with the Pmod
The Pmod NAV communicates with the host board via the SPI protocol. By pulling the appropriate chip select line low (either for the Accelerometer/Gyroscope, the Magnetometer, or the Barometer) users may collect data from any of the four available sensors on the Pmod NAV.
The accelerometer provides full-scale 16-bit signed data for all three Cartesian axes. All of the data is measured as linear acceleration since each axis is measured individually and are all isolated from each other. Gyroscopes measure the angular rotation rate of the module, indicating the degrees per second that the module is being rotated around each axis.
The magnetometer detects the magnetic field present around the module, including both the earth's magnetic field as well as the local magnetic environment around it. Each of the three magnetic axis registers provide signed 16-bit full-scale data with up to ±16 gauss sensitivity. Before using the magnetometer, users should run a calibration routine (available in the code example on the Pmod NAV Resource Center) to correct for any hard iron biases that may be present around them.
The final component on the Pmod NAV is an barometer with an absolute pressure range of 260 to 1260 hPa which is approximately equivalent to 0.25 to 1.25 atm. Note that as a piezoresistive pressure sensor on the Pmod NAV, you can only measure air pressure with the barometer rather than being able to also measure water pressure.
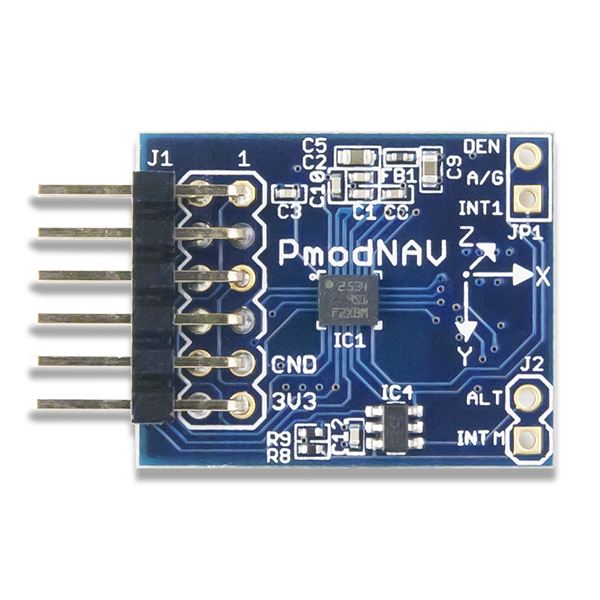
Pinout Description Table
| Header J1 | Header J2 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Pin | Signal | Description | Pin | Signal | Description | Pin | Signal | Description | ||
| 1 | CS_A/G | Chip Select for Accel/Gyro | 7 | INT | Interrupt pin for all components | 1 | INT_M | Interrupt for the Magnetometer | ||
| 2 | SDI | Master-Out-Slave-In | 8 | DRDY_M | Data Ready for the Magnetometer | 2 | INT_ALT | Interrupt for the Altimeter | ||
| 3 | SDO | Master-In-Slave-Out | 9 | CS_M | Chip Select for the Magnetometer | Header JP1 | ||||
| 4 | SCK | Serial Clock | 10 | CS_ALT | Chip Select for the Altimeter | 1 | INT1_A/G | Interrupt 1 for Altimeter/Gyroscope | ||
| 5 | GND | Power Supply Ground | 11 | GND | Power Supply Ground | 2 | DEN_A/G | Data Enable for Altimeter/Gyroscope | ||
| 6 | VCC | Power Supply (3.3V) | 12 | VCC | Power Supply (3.3V) | |||||
Table 1 Connector J1- Pin Descriptions as labeled on the Pmod
The Pmod NAV reports to the host board when users bring the appropriate chip select line low to then read the data from the registers on the LSM9DS1.
Any external power applied to the Pmod NAV must be within 1.9V and 3.6V; however, it is recommended that Pmod is operated at 3.3V.
Physical Dimensions
The pins on the pin header are spaced 100 mil apart. The PCB is 0.8 inches long on the sides parallel to the pins on the pin header and 0.8 inches long on the sides perpendicular to the pin header.
Additional Information
The schematics of the Pmod NAV are available here. Additional information about the IMU including communication modes and specific timings of the chip can be found by checking out its datasheet here. Similarly, the datasheet for the barometer can be found here.
Linux Drivers for the LSM9DS1 IMU and LPS25H barometer are available from ST here. The LPS25H barometer also has an IIO Linux driver available in the mainline Linux kernel at drivers/iio/pressure/st_pressure.
Example code demonstrating how to get information from the Pmod NAV can be found here.
If you have any questions or comments about the Pmod NAV, feel free to post them under the appropriate section (“Add-on Boards”) of the Digilent Forum.